
Lo esencial: Un robot humanoide de Flexion Robotics realiza tareas de oficina complejas de forma autónoma, como recoger paquetes, subir escaleras o usar ascensores, aprendiendo de simulaciones y videos de humanos.
¿Cómo funciona este robot humanoide?
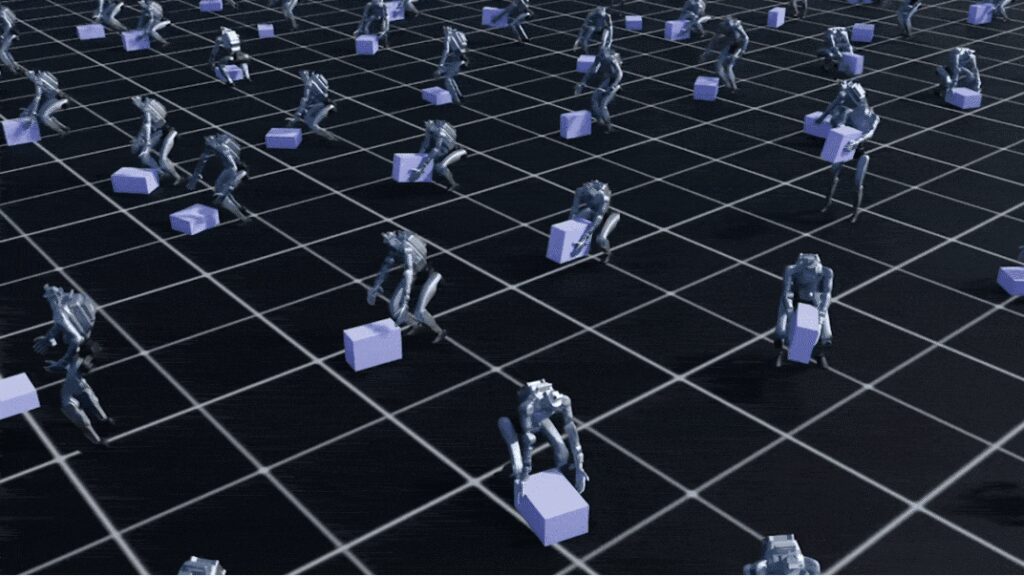
Flexion Robotics, startup suiza fundada por exinvestigadores de Nvidia, ha desarrollado un sistema que entrena robots para ejecutar habilidades sencillas (abrir puertas, transportar cajas) mediante simulación. Un algoritmo de IA maestro combina estas habilidades para tareas complejas en entornos reales.
La mayoría de los humanoides actuales se entrenan con teleoperación (control humano remoto), pero este método falla en entornos desconocidos. El enfoque de Flexion destaca por su autonomía y mínima intervención humana.

¿Qué lo hace diferente?
El sistema usa un modelo de IA que analiza videos de personas para aprender qué acciones realizar (ej: abrir puertas, usar ascensores) y cuándo. Las habilidades físicas (caminar, equilibrio) se entrenan en simulación y luego se aplican en el mundo real.
En la práctica, esto significa que el robot puede recibir órdenes como: «Recoge un paquete, sube por las escaleras, usa el ascensor, abre el paquete y coloca los aperitivos en el cajón vacío» y ejecutarlas sin ayuda.
Lo que debes saber
- Flexion Robotics entrena robots con simulaciones + IA, no con teleoperación.
- El modelo aprende acciones y timing de videos humanos, pero las habilidades físicas vienen de simulaciones.
- El robot controla sus motores para caminar, mover extremidades y mantener el equilibrio.
- Ejemplo real: gestiona tareas logísticas en oficinas (paquetes, estanterías, ascensores).
La clave: Este avance acorta la brecha entre robots y humanos en entornos laborales cotidianos.
¿Qué implica esto para el futuro del trabajo?
En la práctica, este avance demuestra que los robots ya no dependen de control humano remoto para operar en entornos complejos. La autonomía lograda por Flexion Robotics redefine el papel de la IA en tareas logísticas y administrativas.
Lo clave aquí es que la combinación de simulaciones y aprendizaje por observación permite escalar habilidades sin necesidad de reprogramación constante. Esto acelera la adaptación a nuevos entornos, algo crítico para su implementación masiva.
- La autonomía elimina la necesidad de supervisión humana en tiempo real.
- El aprendizaje por videos humanos reduce el tiempo de entrenamiento para tareas específicas.
- La capacidad de ejecutar órdenes secuenciales complejas lo acerca a roles de asistencia operativa.
¿Qué sigue ahora?
La pregunta práctica es cómo se integrarán estos robots en flujos de trabajo existentes. Su capacidad para operar en entornos no estructurados sugiere que el siguiente paso será su despliegue en logística, almacenes y, eventualmente, en entornos domésticos.